Comme leurs homologues naturels, les micros-robots insectes ne cessent de se diversifier. Mais à la différence des vrais insectes, leur taille semble réduire chaque année. L’Université du Maryland présente le plus petit robot à pattes au monde.
Depuis la première version de micro-robot à pattes, le RoACH de l’Université de Berkeley, qui fait maintenant figure de référence dans la discipline, les robots insectes ont connu des évolutions résiduelles mais néanmoins importantes. Dans un premier temps, c’est le poids de la structure RoACH qui a été revu à la baisse grâce aux travaux de l’université, passant de 2.4 grammes à 1,7. D’un hexapode, les chercheurs ont réussi à développer un quadrupède. Aujourd’hui les mini-robots bio-inspirés sont plus variés que jamais. Certains sont capables de ramper et de voler, d’autres de s’entre-aider pour surmonter des obstacles et d’autres encore de sauter des obstacles remarquablement hauts.
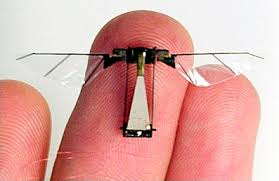
A l’occasion du salon de l’automation et de la robotique ICRA de Stockholm, l’Université de Maryland a dévoilé le plus petit robot à pattes jamais conçu à ce jour. Celui-ci a été mis au point grâce à TinyTeRP, une mini plate-forme de capteurs à destination des petits systèmes robotisés. Elle ne mesure pas plus d’un centimètre, et doit venir équiper de futures petits robots.
Ce micro-robot ne pèse pas plus de 100 mg et possède quatre petites pattes. Dans leur article de recherche, Ryan St-Pierre et sa collègue Sarah Bergbreiter ont montré comment ils parvenaient à faire se déplacer de petits robots grâce à des champs magnétiques. Selon eux, ce n’est qu’un début. Les robots devraient très rapidement devenir beaucoup plus petits. Les deux chercheurs ont étudié toutes les démarches possibles pour leur robot, en testant différentes structures.
Optant initialement pour la structure RHex, celle-ci s’est rapidement révélée inadaptée, les pattes se bloquant régulièrement. Ils ont donc finalement choisi la quadrupèdie en retirant la partie médiane du RHex. Le tout est imprimé en 3D et il suffit d’y intégrer un moteur pour fonctionner dans la foulée. Évidemment, les moteurs utilisés ici ne sont pas de simples moteurs. Aucun moteur digne de ce nom ne rentre dans un si petit corps. Il a donc fallu réfléchir à un autre mode de locomotion.
Comment activer quatre pattes indépendamment avec un moyen de production d’énergie miniature mais efficace ? Ils ont donc opté pour une alimentation magnétique. Chacune des articulations du petit robot est ainsi équipée d’un aimant de 2 mm. Lorsque l’on agite un plus gros aimant à proximité du robot, les champs magnétiques qui se créent permettent au robot de s’animer comme par magie. Ces travaux ont également pu démontrer que le robot était capable de réaliser des petits sauts d’environ 8,3 mm de hauteur, soit 1,5 fois sa propre taille.
Article rédigé par Georges Simmonds pour RT Flash

{kind=link}