Avenir
- Nanotechnologies et Robotique
- Robots industriels
Un robot qui sait se déplacer…sans voir
- Tweeter
-
-
0 avis :

{kind=link}
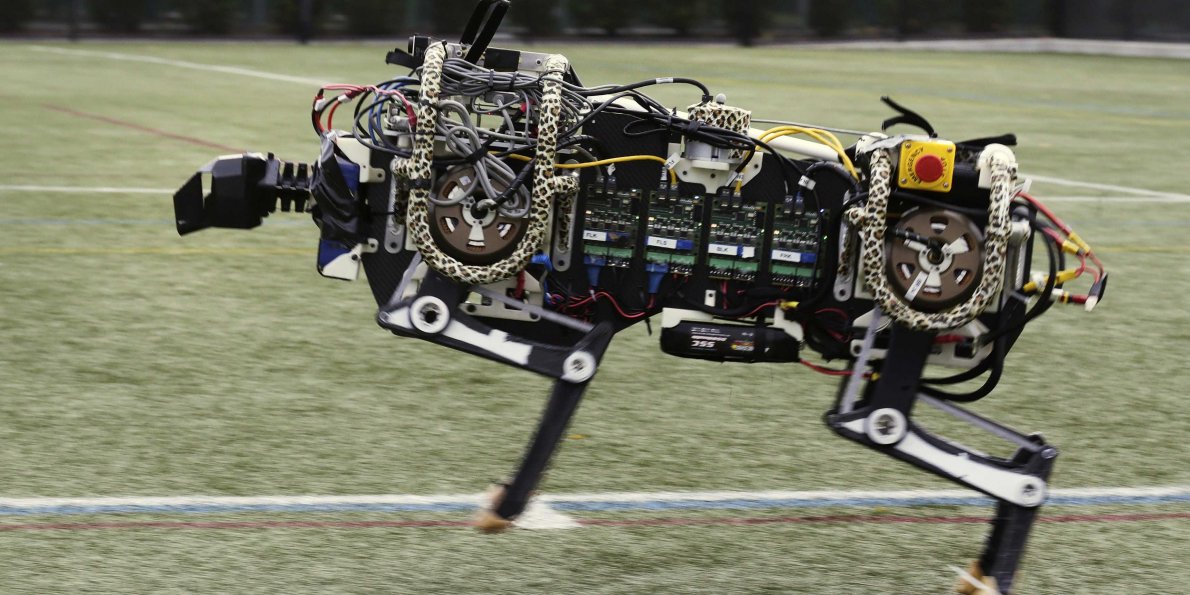
le MIT vient de présenter un robot de nouvelle génération qui a fait sensation. Baptisée Cheetah, cette étonnante machine qui ressemble à un gros chien est en effet capable de se mouvoir « à l’aveugle » dans un environnement irrégulier et encombré ; il peut également sauter sur une table ou se faire bousculer par un homme… sans tomber !
Pouvant atteindre une vitesse maximale de 16 km/heure, les prouesses de ce robot sont d'autant plus remarquables qu'elles sont accomplies sans aucun système de vision. Si les concepteurs de Cheetah ont fait ce choix radical, c'est parce que ce robot devra être capable de gérer des situations inattendues sans se fier à la vision. Comme le souligne l'un de ses créateurs, Kim Sangbae, professeur agrégé de génie mécanique au MIT, « La vision peut être bruyante, légèrement inexacte et parfois non disponible. Et si vous comptez trop sur la vision, votre robot doit être très précis dans la position et sera finalement lent. Nous voulons donc que le robot s’appuie davantage sur des informations tactiles. De cette façon, il peut gérer des obstacles inattendus tout en se déplaçant rapidement ».
Pour pouvoir franchir à l’aveugle des escaliers, évoluer dans des terrains compliqués d’accès ou retrouver son équilibre, Cheetah a un secret : il utilise deux nouveaux algorithmes très sophistiqués développés par le MIT : un algorithme de contact et un algorithme de contrôle prédictif. Le premier aide le robot à déterminer le meilleur moment pour qu’une jambe passe du balancement dans l’air au pas au sol. Et ce, en calculant constamment trois probabilités pour chaque jambe : entrée en contact avec le sol, force générée par le sol et balancement de jambe. L’ensemble est calculé à partir des données reçues par les gyroscopes, accéléromètres et des positions articulaires des jambes.
Le second algorithme permet de prédire la force qu’une jambe doit appliquer sur le sol une fois engagée dans un mouvement. Il calcule les positions du corps et des jambes du robot une demi-seconde dans le futur. L’algorithme est conçu pour réaliser des calculs toutes les 50 millisecondes ou 20 fois par seconde.
A terme, ce robot devrait être capable d’effectuer des tâches dangereuses ou inaccessibles pour les êtres humains. « Cheetah 3 est conçu pour réaliser des tâches polyvalentes telles que l’inspection d’une centrale électrique qui implique divers terrains comme des escaliers, des bordures et des obstacles sur le terrain » ajoute Kim Sangbae.
Article rédigé par Georges Simmonds pour RT Flash
Noter cet article :
Vous serez certainement intéressé par ces articles :

Un robot pour la cueillette des mirabelles
Un nouveau chapitre s'ouvre pour la cueillette des mirabelles en Lorraine. Un robot prénommé Syracus vient de faire ses premiers tests dans un verger de la Meuse. Après 18 mois de recherche et ...

Windy, le robot qui dissuade les voleurs dans les supermarchés
Avis aux Havrais, susceptibles de faire leurs courses dans un supermarché du centre-ville ! Au détour de l'allée confiseries ou légumes... Vous pourrez tomber nez à nez avec Windy. Ce robot tout ...

Un robot flottant pour piéger les microplastiques
Comment s'attaquer au fléau mondial des microplastiques, minuscules morceaux de moins de 5 millimètres provenant de la décomposition d’emballages, de fibres textiles, de filets de pêche… qui ...
Recommander cet article :
- Nombre de consultations : 1149
- Publié dans : Robots industriels
- Partager :