Avenir
- Nanotechnologies et Robotique
- Robots industriels
Quand deux robots s’entraident pour surmonter des obstacles…
- Tweeter
-
-
1 avis :

{kind=link}
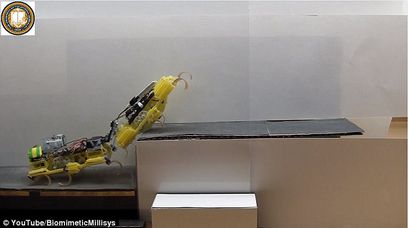
Des chercheurs de l’Université de Californie à Berkeley se sont inspirés du comportement collaboratif des fourmis sauteuses d’Australie pour mettre au point des prototypes de petits robots capables de s’entraider, afin de réaliser certaines tâches qu’ils ne pourraient accomplir seuls.
Baptisés VelociRoACH, pour velocity robotic autonomous crawling hexapod, ces robots de 10 cm de long travaillent par paire de manière à escalader une marche de 6,5 cm de haut, qu’ils ne pourraient gravir seuls sans avoir recours à la coopération. Dans les détails, le premier robot identifie l’obstacle puis commence à l’escalader.
Le second robot, équipé d’un connecteur magnétique et d’un treuil, va en quelque sorte "foncer" dans le premier robot pour lui donner une impulsion et l’aider à gravir le reste de la marche. Une fois que le premier robot s’est hissé sur le haut de la marche, il tire le second robot grâce au treuil. Les deux robots restent connectés en permanence grâce à la longueur du treuil qui peut être modulée selon les étapes.
Pour l’instant, plusieurs tentatives restent nécessaires, avant que les deux robots parviennent à coopérer correctement. Les chercheurs prévoient donc de renforcer la fiabilité du comportement collaboratif par des améliorations logicielles. Ils espèrent également augmenter le nombre de robots impliqués dans ce jeu de collaboration. Autre piste de développement : la coopération de robots terrestres et aériens.
A plus long terme, les auteurs de l’étude estiment que ce dispositif pourrait être particulièrement utile pour des missions de secours ou de cartographie après une catastrophe ou un désastre naturel. Les robots de petite taille ont, en effet, la capacité de se mouvoir avec aisance dans des endroits exigus. Par ailleurs, leur faible coût de fabrication permet d’envisager des déploiements à grande échelle, avec des dizaines, voire des centaines d’unités.
Article rédigé par Georges Simmonds pour RT Flash
Noter cet article :
Vous serez certainement intéressé par ces articles :

Verdie, le robot jardinier polyvalent
La robotique prend ses aises et ce, aussi bien dans le domaine professionnel que dans celui du grand public. En plus des robots aspirateurs et autres systèmes visant à simplifier les corvées ...

Un robot portable révolutionnaire pour décupler la force musculaire des travailleurs
Hyundai Motor, géant de l’industrie automobile, vient de dévoiler un robot portable révolutionnaire conçu pour améliorer la force musculaire des travailleurs industriels. Ce nouvel appareil promet ...

Saint-Malo invente le premier robot cueilleur de tomates
Formidable innovation de trois ingénieurs de haut niveau, qui lancent le premier robot autonome apte à récolter des plants de tomates ou à ramasser les fraises. Un avenir énorme, une jeune pousse à ...
Recommander cet article :
- Nombre de consultations : 235
- Publié dans : Robots industriels
- Partager :